

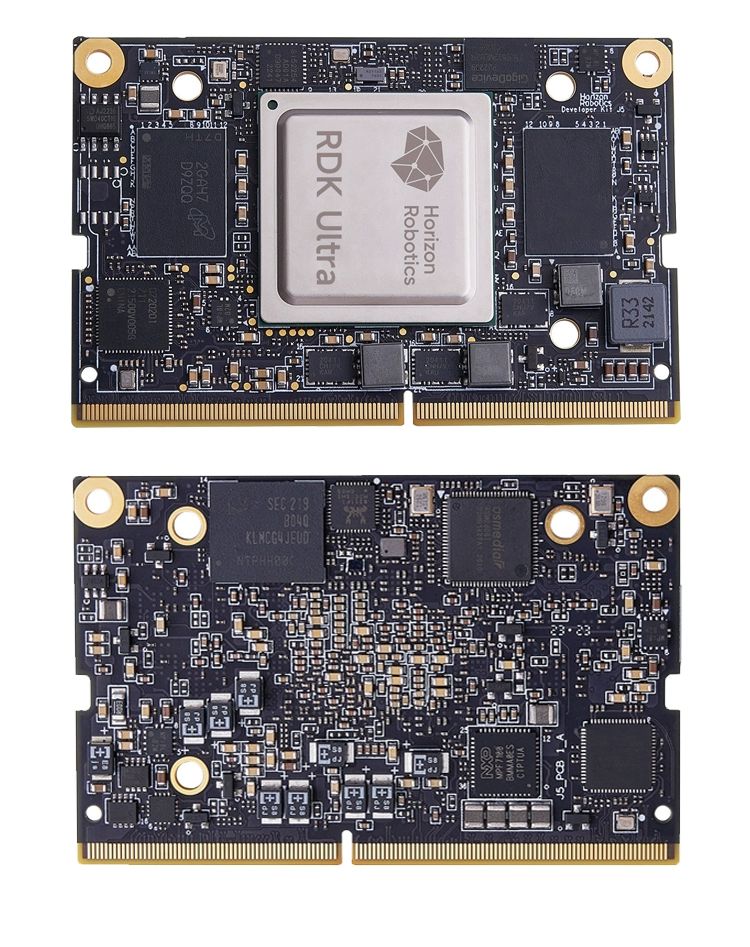
ʻO Horizon RDK Ultra Robot Development Kit Ma luna o ke kāmela MIPI/USB3.0/PCIe2
Hoʻopaʻa hopohopo ʻole
Hele mai ka module koʻikoʻi me ka waihona 64G eMMC a ua mālama ʻia nā awa PCle ʻelua no ke komo maʻalahi i kahi waihona NVMe ʻē aʻe.
Kūkākūkā ʻole
Ma waho aʻe o kahi awa pūnaewele maloʻo megabit, ua hoʻokomo mua ʻia ka pahu pahu pālua pālua ʻelua, e kākoʻo ana i ka Bluetooth 5.0, Wi-Fi pālua ʻelua, ʻoiai e hoʻohui ana i ka antenna PCB, e hāʻawi ana i ka kiʻekiʻe kiʻekiʻe, hilinaʻi pūnaewele pili a me ka hana kamaʻilio Bluetooth no ka kit.
Pākuʻi waiwai
ʻEhā mau awa MIPICamera, ʻehā mau awa USB3.0, a me ʻelua mau awa PCle2.0.
Hoʻopiha piha
ʻO nā mea pono e like me ka lako mana, ka hale, ka mea hoʻoluʻu Wi-Fi module a me ka pahupaʻikiʻi maʻamau.
Hoʻohana makua
Kākoʻo ka ʻōnaehana hana lopako Horizon TogetheROSTM.Bot i ka bev. Hoʻopuka wikiwiki i nā algorithms robot a me nā noi e like me ka binocular depth radar perception.
| ʻāpana huahana | |
| AI mana helu | 96NANA |
| CPU | 8×A551.2G |
| Hoʻomanaʻo kūloko | 8GB LPDDR4 |
| Halekuai | 64GB eMMC |
| Multimedia | H.265/HEVC Codec 4K@60fps. Hoʻopili a me ka hoʻololi ʻana i ka JPEG 16Mpixels CBR, VBR, AVBR, FixQp a me QpMap ka mana bitrate |
| Pākuʻi sensor | 2×4-lane MIPI CSI 2×2-lane MIPI CSI |
| USB | 4×USB3.0 |
| Debug serial port | 1x Micro USB2.0, UART USB |
| Hōʻike ʻike | 1×HDMI1.4, kākoʻo 1080p@60 |
| Hoʻopili pūnaewele uila | Wi-Fi/Bluetooth ʻelua module (koho): Wi-Fi 2.4GHz/5GHz、Bluetooth 4.2 |
| Hoʻopili pūnaewele uea | 1×RJ45 pāʻani |
| IO ʻē aʻe | 40 PIN (UART、SPI、I2S、I2C、PWM、GPIO) 6 x ka mana hiki i ka wāwae 1 x PWM fan interface |
| Hoʻokomo mana | 5~20V 10~25W |
| Kākoʻo pūnaewele | ʻO Ubuntu 20.04 |









-

Kelepona
-

leka uila
-

Whatsapp
-

Skype
-

Skype
-

Skype